15 KiB
[TOC]
0. 更新日志
2024 v0.4版本,介绍耦合求解器基本框架,包含时间推进方法,多体动力学模块与气动、水动模块耦合方法。 2025 v0.6版本,耦合求解器新增公共lib模块,yaml解析模块,控制模块,时间推进过程中增加向控制模块输入参数,控制器返回指令,指令结果向多体动力学模块传递。对照Bladed新增变桨二阶传递函数、电机转矩一阶传递函数。新增Steady Operational Loads, Steady Parked Loads两个稳态工作流,新增Normal Stop, Emergency Stop, Start, Idling, Parked五个Simulation功能。
1. 耦合求解器简介
正常发电工况需要进行气动模块、多体模块、控制模块、漂浮式机组还有水动模块的耦合计算,耦合求解器模块处理在瞬态仿真中所有模块的时间推进,以及在时间推进中模块间的数据传递。
2. 耦合求解器程序介绍
2.1. 耦合求解器程序结构
herolib/ # 公共lib模块
aerodyn/ # 气动模块
controller/ # 控制模块
hydrosim/ # 水动模块
multidyn/ # 多体动力学模块
yaml_herowind # yaml配置文件、模型文件解析模块
drivers/ # 耦合求解器模块
├── coupled_solver_sub.rs # 耦合求解器所用子函数
├── steady_operational_loads.rs # 稳态运行载荷计算函数
├── steady_parked_loads.rs # 稳态停机载荷计算函数
├── power_production_loading.rs # 正常发电工况计算函数
├── normal_stop.rs # 正常停机工况计算函数
├── emergency_stop.rs # 紧急停机工况计算函数
├── start.rs # 启机工况计算函数
├── idling.rs # 空转工况计算函数
├── parked.rs # 停机工况计算函数
└── main.rs # 耦合求解器模块主程序
耦合求解器作为一个完整的rust项目,气动、水动、多体动力学、控制模块作为库引入,耦合求解器模块作为主程序,在耦合求解器控制的初始化、时间推进、数据传递中,调用气动、水动、多体模块函数。
2.2. 主要子模块的功能介绍
2.2.1 yaml_herowind模块
yaml_herowind模块专门用来解析yaml格式配置文件及模型文件。
yaml_herowind/ # 耦合求解器模块
├── calc_config.rs # yaml配置文件对应结构体
├── lib.rs # 封装解析功能函数
└── turbine_model.rs # yaml模型文件对应结构体
2.2.1.1 calc_config.rs
在配置文件中,定义当前计算求解器选择,来流条件,气动模型选择,机组初始条件,控制模块输入参数等,在calc_config.rs中对上述参数单独创建结构体,实现从配置文件到软件结构体的解析。部分结构体展示如下。
InitialConditions结构体定义了风电机组初始状态,包括初始桨距角,初始转速,初始叶片、塔架位移,漂浮式风电机组初始浮式平台位移、角度等。
#[derive(Serialize, Deserialize, Debug)]
pub struct InitialConditions {
pub out_of_plane_def: f64,
pub in_plane_def: f64,
pub blade_1_pitch_degs: f64,
pub blade_2_pitch_degs: f64,
pub blade_3_pitch_degs: f64,
pub azimuth_degs: f64,
pub rotor_speed_rpm: f64,
pub nacelle_yaw_degs: f64,
pub tower_top_fore_aft_disp: f64,
pub tower_top_side_to_side_disp: f64,
pub ptfm_surge_disp: f64,
pub ptfm_sway_disp: f64,
pub ptfm_heave_disp: f64,
pub ptfm_roll_degs: f64,
pub ptfm_pitch_degs: f64,
pub ptfm_yaw_degs: f64,
}
ADGeneralOptions结构体定义了湍流发展模型,尾流模型等。
#[derive(Debug, Deserialize, Clone)]
pub struct ADGeneralOptions {
pub echo: bool, // Echo (flag)
pub dt_aero: MaybeDefault<f64>, // DTAero (s or "default")
pub wakemod: i32, // WakeMod (switch)
pub afaeromod: i32, // AFAeroMod (switch)
pub twrpotent: i32, // TwrPotent (switch)
pub twrshadow: i32, // TwrShadow (switch)
pub twraero: bool, // TwrAero (flag)
pub frozen_wake: bool, // FrozenWake (flag)
pub cavit_check: bool, // CavitCheck (flag)
pub buoyancy: bool, // Buoyancy (flag)
pub comp_aa: bool, // CompAA (flag)
pub aa_input_file: String, // AA_InputFile (string)
}
InflowConfigSection结构体定义了来流风的类型,此处可选稳态风、阵风、湍流风等。
#[derive(Debug, Deserialize, Clone)]
pub struct InflowConfigSection {
pub echo: bool,
pub wind_type: i32,
pub propagation_dir: f64,
pub vflow_ang: f64,
pub vel_interp_cubic: bool,
pub n_wind_vel: usize,
pub wind_vxi_list: Vec<f64>,
pub wind_vyi_list: Vec<f64>,
pub wind_vzi_list: Vec<f64>,
}
ControllerInput结构体定义了控制器模块的输入参数,包括dll文件路径,discon.in文件路径,dll文件是32位还是64位,以及一些桨距、转矩等必要参数。
#[derive(Debug, Deserialize)]
pub struct ControllerInput {
pub dll_path: String, // dll文件路径
pub acc_infile: String, // discon.in文件路径
pub dll_bit: i32,
pub pitch_min: f64, // 最小桨距角: 0度
pub pitch_max: f64, // 最大桨距角: 90度
pub pitch_rate_min: f64, // 最小收桨速率 单位:弧度/秒
pub pitch_rate_max: f64,
pub pitch_actuator_type: i32, // 变桨控制方式 0:位置 1:速率
pub gen_power_dem: f64, // 风机发电功率需求 单位:W
pub gen_speed_dem: f64, // 风机发电转速需求 单位:rpm
pub gen_torque_dem: f64, // 风机发电转矩需求 单位:N·m
pub gain_optimal: f64, // 最优模型增益
pub gen_speed_min: f64, // 切入转速 单位:rpm
pub gen_speed_max: f64, // 最优追踪最大转速 单位:rpm
pub pitch_control: i32, // 变桨响应方式 0:同步 1:独立
pub yaw_control: i32, // 偏航控制方式 0:速率 1:转矩
pub gen_speed: f64, //
pub generator_efficiency: f64, // 发电机效率
pub freq_pitch_actuator: f64,
pub damping_factor_pitch_actuator: f64,
pub tau_torque_demand: f64,
}
Task结构体定义了求解器选择,当前从main.rs作为入口可选择5种稳态求解器,6种瞬态求解器,Task结构体定义了本配置文件计算类型及对应计算的配置参数。
// Task 结构体,包含自定义反序列化逻辑
#[derive(Debug, Clone)]
pub struct Task {
pub task_type: TaskType,
pub actived: bool,
pub params: TaskParams,
}
#[derive(Debug, Deserialize, Clone, PartialEq)]
#[serde(rename_all = "PascalCase")] // 匹配 "Aerodynamic Information" 等
pub enum TaskType {
#[serde(rename = "Aerodynamic Information")]
AerodynamicInformation,
#[serde(rename = "Performance Coefficients")]
PerformanceCoefficients,
#[serde(rename = "Steady Power Curve")]
SteadyPowerCurve,
#[serde(rename = "Steady Operational Loads")]
SteadyOperationalLoads,
#[serde(rename = "Steady Parked Loads")]
SteadyParkedLoads,
#[serde(rename = "Power Production Loading")]
PowerProductionLoading,
Start,
#[serde(rename = "Emergency Stop")]
EmergencyStop,
#[serde(rename = "Normal Stop")]
NormalStop,
Idling,
Parked,
}
#[derive(Debug, Clone)]
pub enum TaskParams {
AerodynamicInformation { data: AerodynamicInformationParams },
PerformanceCoefficients { data: PerformanceCoefficientsParams },
SteadyPowerCurve { data: SteadyPowerCurveParams },
SteadyOperationalLoads { data: SteadyOperationalLoadsParams },
SteadyParkedLoads { data: SteadyParkedLoadsParams },
PowerProductionLoading { data: SimulationControlParams },
Start { data: SimulationControlParams },
EmergencyStop { data: StopSimulationParams },
NormalStop { data: StopSimulationParams },
Idling { data: SimulationControlParams },
Parked { data: SimulationControlParams },
}
#[derive(Debug, Deserialize, Clone)]
pub struct AerodynamicInformationParams {
pub wind_speed: f64,
pub pitch: f64,
pub omega: f64,
}
ForSaveConfig结构体定义了dlc计算中此配置文件对应的dlc工况名,以及结果保存路径。计算过程中会在save_path保存计算结果,并且输出的结果文件会用dlc_name来命名。
#[derive(Debug, Deserialize, Clone)]
pub struct ForSaveConfig {
pub dlc_name: String,
pub save_path: String,
}
2.2.1.2 turbine_model.rs
turbine_model基于WindIO定义风电机组模型主要参数,包括叶片、翼型、轮毂、机舱、塔架等。
Components结构体集中包含叶片、轮毂等部件,每个部件又有自己对应的结构体类型,如叶片结构体包含外形、弹性参数定义结构体,轮毂部件包含外形、弹性参数结构体,共同定义了轮毂的尺寸,预锥角,质量和惯性等参数。
#[derive(Serialize, Deserialize, Debug)]
pub struct Components {
pub blade: Blade,
pub hub: Hub,
pub nacelle: Nacelle,
pub tower: Tower,
pub floating_platform: FloatingPlatform,
}
#[derive(Serialize, Deserialize, Debug)]
pub struct Blade {
pub outer_shape_bem: OuterShapeBEMBlade,
pub elastic_properties_mb: ElasticPropertiesMBBlade,
pub elastodyn_blade: ElastodynBlade,
}
#[derive(Serialize, Deserialize, Debug)]
pub struct Hub {
pub outer_shape_bem: OuterShapeBEMHub,
pub elastic_properties_mb: ElasticPropertiesMBHub,
}
#[derive(Serialize, Deserialize, Debug)]
pub struct OuterShapeBEMHub {
pub root_length: f64,
pub pre_cone_1_deg: f64,
pub pre_cone_2_deg: f64,
pub pre_cone_3_deg: f64,
pub drag_coefficient: f64,
}
#[derive(Serialize, Deserialize, Debug)]
pub struct ElasticPropertiesMBHub {
pub hub_mass: f64,
pub hub_inertia: f64,
pub hub_center_mass: f64,
}
2.2.1.3 lib.rs
lib.rs引用calc_config.rs和turbine_model.rs,使用serde_yaml包实现yaml文件的一行代码解析,同时封装出parse_model和parse_calc_config两个函数供main函数使用,两个函数成果解析文件,会返回turbine_model和calc_config两个包含完整配置参数的结构体,供main函数后续使用。lib.rs代码较少,完整展示如下。
mod turbine_model;
pub mod calc_config;
use serde_yaml;
use std::fs;
pub use turbine_model::TurbineModel;
pub use calc_config::CalcConfigrations;
pub fn parse_model(file: &str) -> TurbineModel {
let file_content =
fs::read_to_string(file).expect("Failed to read YAML file");
match serde_yaml::from_str::<TurbineModel>(&file_content) {
Ok(turbine_model) => turbine_model,
Err(e) => panic!("Error parsing YAML: {}", e),
}
}
pub fn parse_calc_config(file: &str) -> CalcConfigrations {
let file_content =
fs::read_to_string(file).expect("Failed to read YAML file");
match serde_yaml::from_str::<CalcConfigrations>(&file_content) {
Ok(calc_config) => calc_config,
Err(e) => panic!("Error parsing YAML: {}", e),
}
}
2.2.1. main.rs
main:耦合求解器主函数,执行气动、水动、多体模块数据结构体的初始化,模块初始化,时间迭代过程。
2.2.2. coupled_solver_sub.rs
fast_init:初始化函数,按照参与模块初始化,包括气动模块、水动模块、多体模块的初始化。fast_solution_0:耦合求解器t0时刻计算。calc_outputs_and_solve_for_inputs:计算多模块的输出,模块间交互数据。solve_option_2a_inp2_bd:多体模块执行计算,气动模块接收多体计算数据。solve_option_2:气动模块计算,多体模块接收气动计算数据。fast_solution_t:耦合求解器时间推进计算。fast_extrap_interp_mods:多体动力学模块输入外推。fast_advance_states:多体动力学模块状态推进,使用四阶Adams-Bashforth-Moulton预估矫正方法。transfer_platform_motion_to_hd:多体动力学模块输出平台运动传递给水动模块。transfer_hd_forces_moments_to_ed:水动模块输出力和力矩传递给多体动力学模块。calc_ed_hd_residual:计算多体与水动模块传递结果残差。
2.3. 耦合求解器流程图
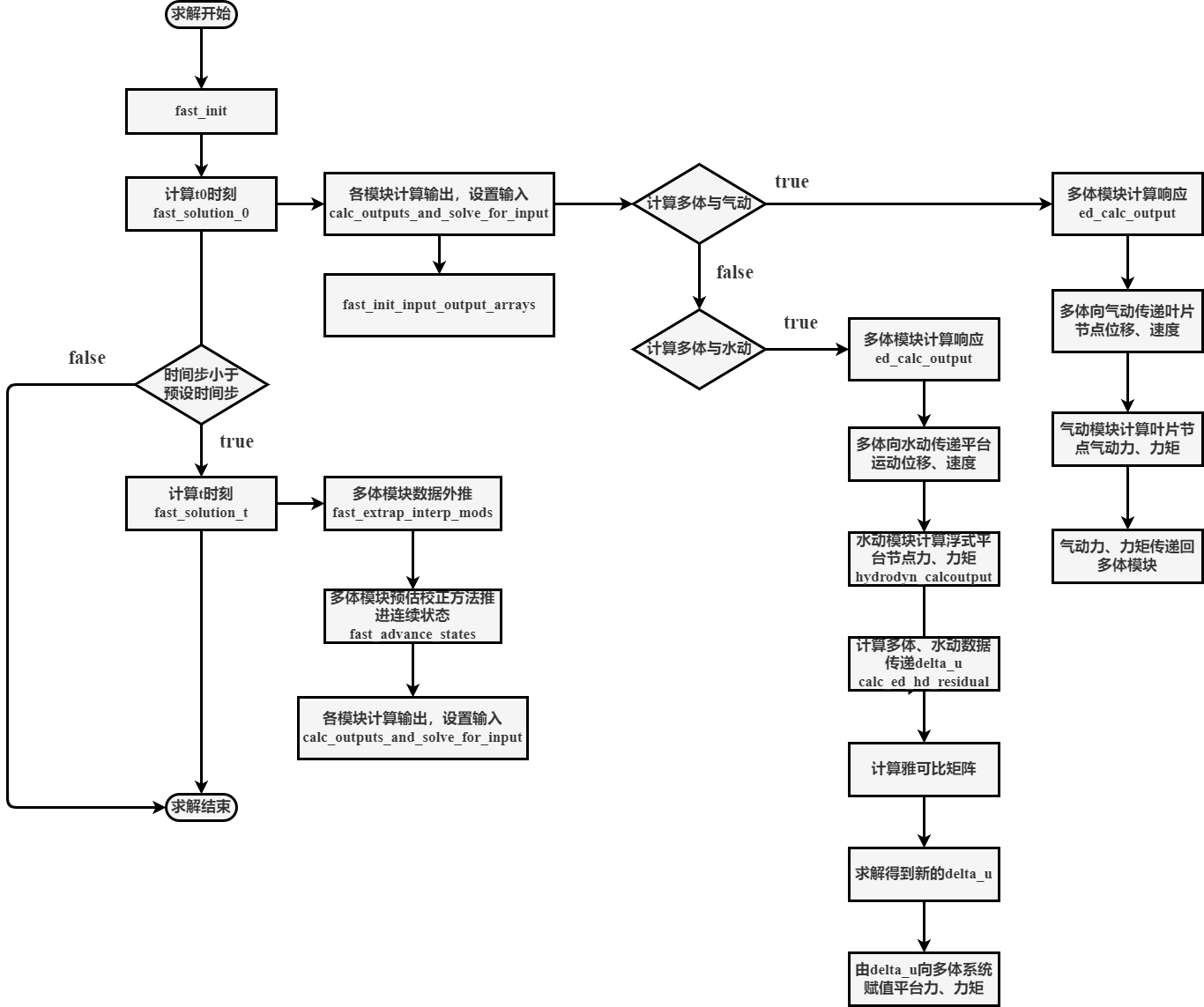
耦合求解器在时间推进计算中,首先初始化气动、水动、多体模块,然后进行t0时刻计算,之后进行时间推进计算。t0时刻,调用calc_outputs_and_solve_for_inputs函数,多体动力学模块根据输入参数计算该时刻各自由度响应,如果是多体与气动耦合,多体将响应传递给气动模块,如叶片节点的变形量,变形速度等,气动模块接收响应,执行自身模块计算,计算完成后将叶片节点上的力和力矩回传给多体动力学模块。如果是多体模块和水动模块联合,为了计算稳定性,在传递中需要额外加入雅可比矩阵计算,结合残差函数calc_ed_hd_residual计算得到的delta_u,计算从新的delta_u给多体动力学模块赋值。
时间推进过程中多体动力学模块需要调用fast_extrap_interp_mods函数将输入外推至下一时刻,然后调用fast_advance_states函数进行状态推进,推进过程中需要使用四阶龙格库塔方法或Adams-Bashforth-Moulton预估矫正方法。推进完成后调用calc_outputs_and_solve_for_inputs函数,计算流程与t0时刻相同。持续开展时间迭代,直到达到仿真结束时间步,计算结束。