[TOC]
# 0. 更新日志
2024 v0.4版本,介绍耦合求解器基本框架,包含时间推进方法,多体动力学模块与气动、水动模块耦合方法。
2025 v0.6版本,耦合求解器新增公共lib模块,yaml解析模块,控制模块,时间推进过程中增加向控制模块输入参数,控制器返回指令,指令结果向多体动力学模块传递。对照Bladed新增变桨二阶传递函数、电机转矩一阶传递函数。新增Steady Operational Loads, Steady Parked Loads两个稳态工作流,新增Normal Stop, Emergency Stop, Start, Idling, Parked五个Simulation功能。
# 1. 耦合求解器简介
正常发电工况需要进行气动模块、多体模块、控制模块、漂浮式机组还有水动模块的耦合计算,耦合求解器模块处理在瞬态仿真中所有模块的时间推进,以及在时间推进中模块间的数据传递。
# 2. 耦合求解器程序介绍
## 2.1. 耦合求解器程序结构
```
herolib/ # 公共lib模块
aerodyn/ # 气动模块
controller/ # 控制模块
hydrosim/ # 水动模块
multidyn/ # 多体动力学模块
yaml_herowind # yaml配置文件、模型文件解析模块
drivers/ # 耦合求解器模块
├── coupled_solver_sub.rs # 耦合求解器所用子函数
├── steady_operational_loads.rs # 稳态运行载荷计算函数
├── steady_parked_loads.rs # 稳态停机载荷计算函数
├── power_production_loading.rs # 正常发电工况计算函数
├── normal_stop.rs # 正常停机工况计算函数
├── emergency_stop.rs # 紧急停机工况计算函数
├── start.rs # 启机工况计算函数
├── idling.rs # 空转工况计算函数
├── parked.rs # 停机工况计算函数
└── main.rs # 耦合求解器模块主程序
```
耦合求解器作为一个完整的rust项目,气动、水动、多体动力学、控制模块作为库引入,耦合求解器模块作为主程序,在耦合求解器控制的初始化、时间推进、数据传递中,调用气动、水动、多体模块函数。
## 2.2. 主要子模块的功能介绍
### 2.2.1. main.rs
- `main`:耦合求解器主函数,执行气动、水动、多体模块数据结构体的初始化,模块初始化,时间迭代过程。
### 2.2.2. coupled_solver_sub.rs
- `fast_init`:初始化函数,按照参与模块初始化,包括气动模块、水动模块、多体模块的初始化。
- `fast_solution_0`:耦合求解器t0时刻计算。
- `calc_outputs_and_solve_for_inputs`:计算多模块的输出,模块间交互数据。
- `solve_option_2a_inp2_bd`:多体模块执行计算,气动模块接收多体计算数据。
- `solve_option_2`:气动模块计算,多体模块接收气动计算数据。
- `fast_solution_t`:耦合求解器时间推进计算。
- `fast_extrap_interp_mods`:多体动力学模块输入外推。
- `fast_advance_states`:多体动力学模块状态推进,使用四阶Adams-Bashforth-Moulton预估矫正方法。
- `transfer_platform_motion_to_hd`:多体动力学模块输出平台运动传递给水动模块。
- `transfer_hd_forces_moments_to_ed`:水动模块输出力和力矩传递给多体动力学模块。
- `calc_ed_hd_residual`:计算多体与水动模块传递结果残差。
## 2.3. 耦合求解器流程图
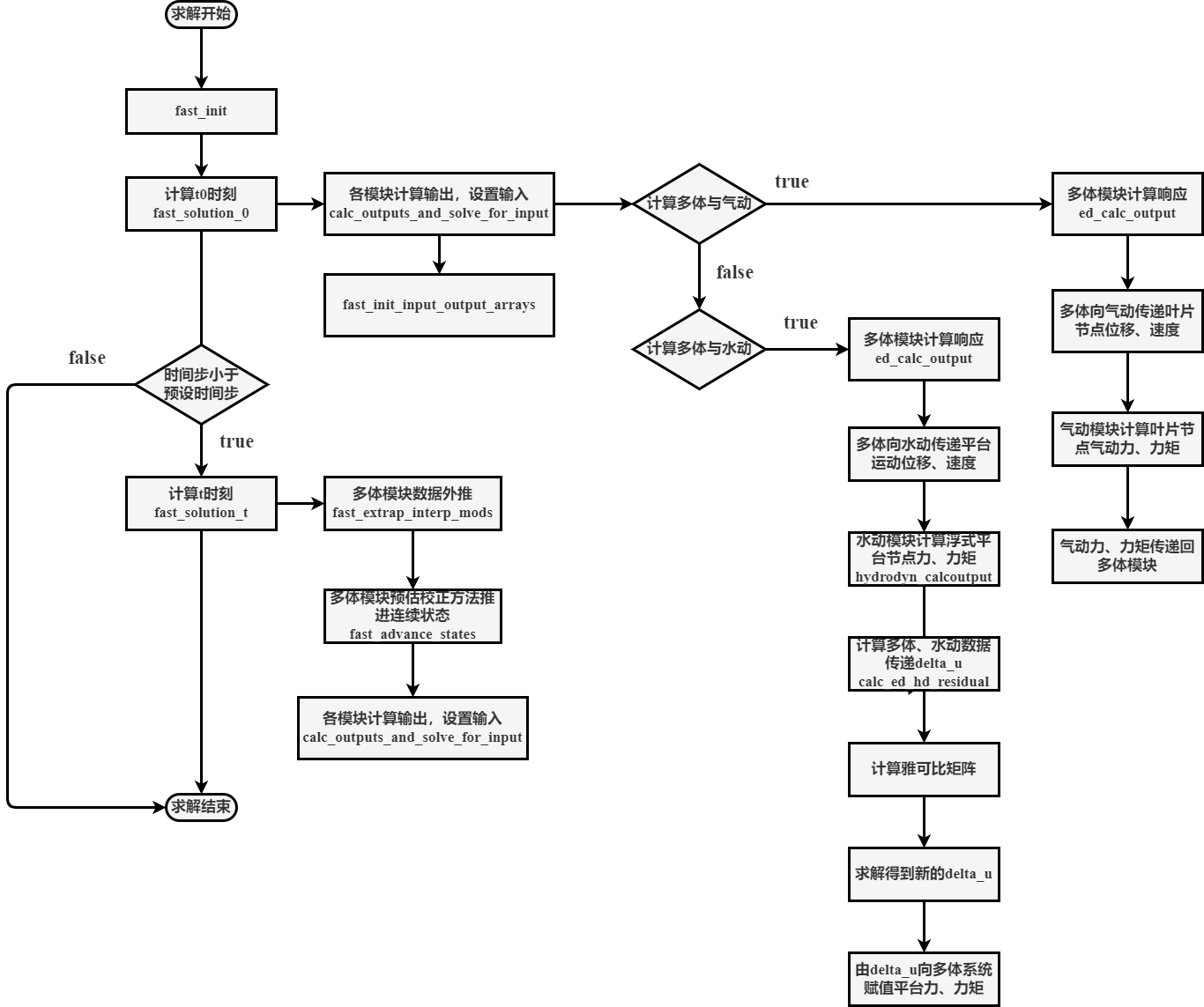 图1: 耦合求解器流程图
耦合求解器在时间推进计算中,首先初始化气动、水动、多体模块,然后进行t0时刻计算,之后进行时间推进计算。t0时刻,调用`calc_outputs_and_solve_for_inputs`函数,多体动力学模块根据输入参数计算该时刻各自由度响应,如果是多体与气动耦合,多体将响应传递给气动模块,如叶片节点的变形量,变形速度等,气动模块接收响应,执行自身模块计算,计算完成后将叶片节点上的力和力矩回传给多体动力学模块。如果是多体模块和水动模块联合,为了计算稳定性,在传递中需要额外加入雅可比矩阵计算,结合残差函数`calc_ed_hd_residual`计算得到的delta_u,计算从新的delta_u给多体动力学模块赋值。
时间推进过程中多体动力学模块需要调用`fast_extrap_interp_mods`函数将输入外推至下一时刻,然后调用`fast_advance_states`函数进行状态推进,推进过程中需要使用四阶龙格库塔方法或Adams-Bashforth-Moulton预估矫正方法。推进完成后调用`calc_outputs_and_solve_for_inputs`函数,计算流程与t0时刻相同。持续开展时间迭代,直到达到仿真结束时间步,计算结束。
## 2.4 steady operational loads
## 2.5 Steady parked loads
## 2.6 Simulations
图1: 耦合求解器流程图
耦合求解器在时间推进计算中,首先初始化气动、水动、多体模块,然后进行t0时刻计算,之后进行时间推进计算。t0时刻,调用`calc_outputs_and_solve_for_inputs`函数,多体动力学模块根据输入参数计算该时刻各自由度响应,如果是多体与气动耦合,多体将响应传递给气动模块,如叶片节点的变形量,变形速度等,气动模块接收响应,执行自身模块计算,计算完成后将叶片节点上的力和力矩回传给多体动力学模块。如果是多体模块和水动模块联合,为了计算稳定性,在传递中需要额外加入雅可比矩阵计算,结合残差函数`calc_ed_hd_residual`计算得到的delta_u,计算从新的delta_u给多体动力学模块赋值。
时间推进过程中多体动力学模块需要调用`fast_extrap_interp_mods`函数将输入外推至下一时刻,然后调用`fast_advance_states`函数进行状态推进,推进过程中需要使用四阶龙格库塔方法或Adams-Bashforth-Moulton预估矫正方法。推进完成后调用`calc_outputs_and_solve_for_inputs`函数,计算流程与t0时刻相同。持续开展时间迭代,直到达到仿真结束时间步,计算结束。
## 2.4 steady operational loads
## 2.5 Steady parked loads
## 2.6 Simulations