# Implicit Floquet analysis of wind turbines using tangent matrices of a non-linear aeroelastic code
利用非线性气弹耦合代码的切线矩阵进行风电机组的隐式Floquet分析
P. F. Skjoldan1 and M. H. Hansen2
1 Loads, Aerodynamic and Control, Siemens Wind Power A/S, DK-2630 Taastrup, Denmark
2 Wind Energy Division, National Laboratory for Sustainable Energy, Risø DTU, DK-4000 Roskilde, Denmark
# ABSTRACT
The aeroelastic code BHawC for calculation of the dynamic response of a wind turbine uses a non-linear finite element formulation. Most wind turbine stability tools for calculation of the aeroelastic modes are, however, based on separate linearized models. This paper presents an approach to modal analysis where the linear structural model is extracted directly from BHawC using the tangent system matrices when the turbine is in a steady state. A purely structural modal analysis of the periodic system for an isotropic rotor operating at a stationary steady state was performed by eigenvalue analysis after describing the rotor degrees of freedom in the inertial frame with the Coleman transformation. For general anisotropic systems, implicit Floquet analysis, which is less computationally intensive than classical Floquet analysis, was used to extract the least damped modes. Both methods were applied to a model of a three-bladed $2.3\;\mathrm{MW}$ Siemens wind turbine model. Frequencies matched individually and with a modal identification on time simulations with the non-linear model. The implicit Floquet analysis performed for an anisotropic system in a periodic steady state showed that the response of a single mode contains multiple harmonic components differing in frequency by the rotor speed.
用于计算风电机组动态响应的空气弹性代码 BHawC 采用非线性有限元公式。然而,大多数用于计算空气弹性模态的风电机组稳定性工具仍然基于单独的线性化模型。本文提出了一种模态分析方法,该方法利用风电机组处于稳态时的切线系统矩阵,直接从 BHawC 中提取线性结构模型。通过描述惯性坐标系下的风轮自由度,并使用科尔曼变换,对各向同性风轮在固定稳态下的周期系统进行纯结构模态分析,采用特征值分析实现。对于一般的各向异性系统,采用隐式Floquet分析,其计算强度小于传统的Floquet分析,用于提取阻尼最小的模态。这两种方法都应用于一个三叶片 2.3 MW 西门子风电机组模型。特征频率与非线性模型的时间模拟模态识别结果相符。隐式Floquet分析表明,对于周期稳态下的各向异性系统,单个模态的响应包含多个频率不同的谐波分量,这些频率之差为风轮转速。
Copyright $\copyright$ 2011 John Wiley & Sons, Ltd.
# KEYWORDS
modal analysis; Floquet analysis; rotor dynamics
# Correspondence
P. F. Skjoldan, Loads, Aerodynamic and Control, Siemens Wind Power A/S, Dybendalsvænget 3, DK-2630 Taastrup, Denmark. E-mail: peter.skjoldan@siemens.com
Received 26 June 2010; Revised 7 October 2010; Accepted 12 February 2011
# 1. INTRODUCTION
Today, advanced non-linear finite element codes1–3 are routinely used for load calculations on wind turbines. Most wind turbine stability tools for calculation of the aeroelastic modes are, however, based on separate linearized models. Stability analysis can be divided into three steps: first, a calculation of the steady state; then, a linearization of the equations of motion about the steady state and last, a modal analysis to extract modal frequencies, damping and mode shapes. This paper presents an approach to structural modal analysis applicable to any periodic steady state where the linearization is obtained directly from the non-linear wind turbine aeroelastic code BHawC.3
The equations of motion for a wind turbine operating at a constant mean rotor speed contain periodic coefficients, preventing direct eigenvalue analysis of the system. Most recent wind turbine stability tools $4\mathrm{-}7$ incorporate the Coleman transformation, also known as the multiblade coordinate transformation, which describes the rotor degrees of freedom in the inertial frame. This transformation eliminates the periodic coefficients if the system is isotropic, i.e. the rotor consists of identical symmetrically mounted blades, and the environment conditions are symmetric. Floquet analysis is, however, applicable to anisotropic systems and any periodic steady state. It requires integration of the equations of motion over a period of rotor rotation, as many times as there are state variables in the system. Because of the computational burden of this approach, it has only been applied to reduce or simplify wind turbine models with a limited number of degrees of freedom.8–10 One way to reduce the computation time is to use the Fast Floquet Theory11 where only one third of the integrations are necessary for a three-bladed isotropic rotor. Another way is to use implicit Floquet analysis12 where the least damped modes can be extracted after a limited number of integrations.
Stol et al.13 compare the Floquet analysis with the Coleman transformation approach applied to a periodic steady state, where the remaining periodic coefficients are eliminated by averaging and find small differences in modal frequencies and damping, concluding that it is not necessary to use Floquet analysis.
Another approach to modal analysis is system identification,14–16 which operates on the response from numerical simulations or measurements, and no knowledge of the system equations is needed to extract the modal properties. The accuracy of the methods is, however, limited and depends on the chosen excitation.
In this paper, tangent matrices for mass, damping and stiffness are extracted from the aeroelastic code BHawC. If the system is isotropic and the steady state is stationary, the Coleman transformation is applied before extracting the modal parameters by eigenvalue analysis. For an anisotropic system, implicit Floquet analysis is used for the modal analysis. When the system is isotropic, the response of a single mode contains a single harmonic component for tower degrees of freedom and up to three components for the blades. The response of a single mode in the anisotropic system on both blades and tower contains multiple harmonic components differing in frequency by the rotor speed.
Section 2 of this paper describes the BHawC model, and Section 3 explains the methods for modal analysis, the Coleman transformation approach, the implicit Floquet analysis and also the partial Floquet analysis, a system identification technique. In Section 4, the methods are applied to a model of a wind turbine. Section 5 discusses the approaches, and Section 6 concludes the paper.
今天,先进的非线性有限元代码1–3被常规地用于风电机组的载荷计算。然而,大多数用于计算气弹振模态的风电机组稳定性工具,仍然基于独立的线性化模型。**稳定性分析可以分为三个步骤:首先,计算稳态;然后,对稳态运动方程进行线性化;最后,进行模态分析以提取模态频率、阻尼和模态形状**。本文提出了一种适用于任何周期稳态的结构模态分析方法,该方法直接从非线性风电机组气弹振代码BHawC.3中获得线性化结果。
在恒定平均风轮转速下运行的风电机组的运动方程包含周期系数,这阻止了对系统的直接特征值分析。大多数最近的风电机组稳定性工具$4\mathrm{-}7$采用了科尔曼变换,也称为多叶坐标变换,它在惯性坐标系中描述了风轮的自由度。如果系统是各向同性的,即风轮由对称安装的相同叶片组成,并且环境条件对称,则该变换可以消除周期系数。然而,Floquet分析适用于各向异性系统和任何周期稳态。它需要对运动方程在风轮旋转一个周期内进行积分,积分次数等于系统状态变量的数量。由于这种方法的计算负担,它仅被用于减少或简化具有有限自由度的风电机组模型。8–10 一种减少计算时间的方法是使用快速Floquet理论11,对于三叶各向同性风轮,只需要进行三分之一的积分。另一种方法是使用隐式Floquet分析12,可以在有限次数的积分后提取最弱阻尼的模态。
Stol等人13将Floquet分析与应用于周期稳态的科尔曼变换方法进行比较,通过平均消除剩余的周期系数,发现模态频率和阻尼存在微小差异,得出结论:不需要使用Floquet分析。
模态分析的另一种方法是系统辨识14–16,它基于数值模拟或测量结果,无需了解系统方程即可提取模态特性。然而,这些方法的精度有限,并且取决于所选的激励。
在本文中,质量、阻尼和刚度的切线矩阵从气弹振代码BHawC中提取。如果系统是各向同性的,稳态是静态的,则在提取模态参数并通过特征值分析之前,应用科尔曼变换。对于各向异性系统,使用隐式Floquet分析进行模态分析。当系统是各向同性的时,单个模态的响应包含单个谐波分量,用于塔架自由度,对于叶片则包含多达三个分量。各向异性系统中的单个模态响应,对于叶片和塔架都包含多个谐波分量,这些分量在频率上不同,相差风轮转速。
本文第2节描述了BHawC模型,第3节解释了模态分析方法,科尔曼变换方法、隐式Floquet分析以及部分Floquet分析(一种系统辨识技术)。第4节将这些方法应用于风电机组模型。第5节讨论这些方法,第6节总结了本文。
# 2. STRUCTURAL MODEL
The BHawC wind turbine aeroelastic code3 is based on a structural finite element model sketched in Figure 1, where the main structural parts, tower, nacelle, shaft, hub and blades, are modelled as two-node 12-degrees of freedom Timoshenko beam elements. The code uses a corotational formulation, where each element has its own coordinate system that rotates with the element. The elastic deformation is described in the element frame, whereas the movement of the element coordinate system accounts for rigid body motion. In this way, a geometrically non-linear model is obtained using linear finite elements.
The configuration of the system, defined by nodal positions $\pmb{p}$ and orientations $\pmb q$ , nodal velocities $\dot{\pmb u}$ (of both positions and orientations) and nodal accelerations $\ddot{u}$ , must satisfy the equilibrium equation given in global coordinates as
BHawC风电机组气弹振代码3基于图1所示的结构有限元模型,其中主要结构部件,塔架、机舱、主轴、轮毂和叶片,被建模为两节点12自由度Timoshenko梁单元。该代码采用corotational公式,其中每个单元拥有自己的坐标系,该坐标系随单元旋转。弹性变形在单元坐标系中描述,而单元坐标系的运动则考虑了刚体运动。 这样,就使用线性有限元获得了几何非线性模型。
系统的配置,由节点位置 $\pmb{p}$ 和姿态 $\pmb q$ ,节点速度 $\dot{\pmb u}$ (位置和姿态均包含)和节点加速度 $\ddot{u}$ 定义,必须满足以全局坐标表示的平衡方程。
$$
f_{\mathrm{iner}}(\boldsymbol{p},\boldsymbol{q},\dot{\boldsymbol{u}},\ddot{\boldsymbol{u}})+f_{\mathrm{damp}}(\boldsymbol{q},\dot{\boldsymbol{u}})+f_{\mathrm{int}}(\boldsymbol{p},\boldsymbol{q})=f_{\mathrm{ext}}
$$
where $f_{\mathrm{iner}},f_{\mathrm{damp}},f_{\mathrm{int}}$ and $\pmb{f}_{\mathrm{ext}}$ are the inertial, damping, internal and external force vectors, respectively, and $\dot{\mathrm{O}}=\mathrm{d}/\mathrm{d}t$ denotes a time derivative. The inertial forces depend on the acceleration of the masses, the damping forces are given by viscous damping, the internal forces are due to elastic forces and the external forces contain the aerodynamic forces.17 To find
其中,$f_{\mathrm{iner}}$、 $f_{\mathrm{damp}}$、 $f_{\mathrm{int}}$ 和 $\pmb{f}_{\mathrm{ext}}$ 分别为惯性力、阻尼力、内力以及外力矢量,且 $\dot{\mathrm{O}}=\mathrm{d}/\mathrm{d}t$ 表示时间导数。惯性力取决于质量的加速度,阻尼力由粘性阻尼给出,内力由弹性力引起,外力包含气动力。17 为了找到
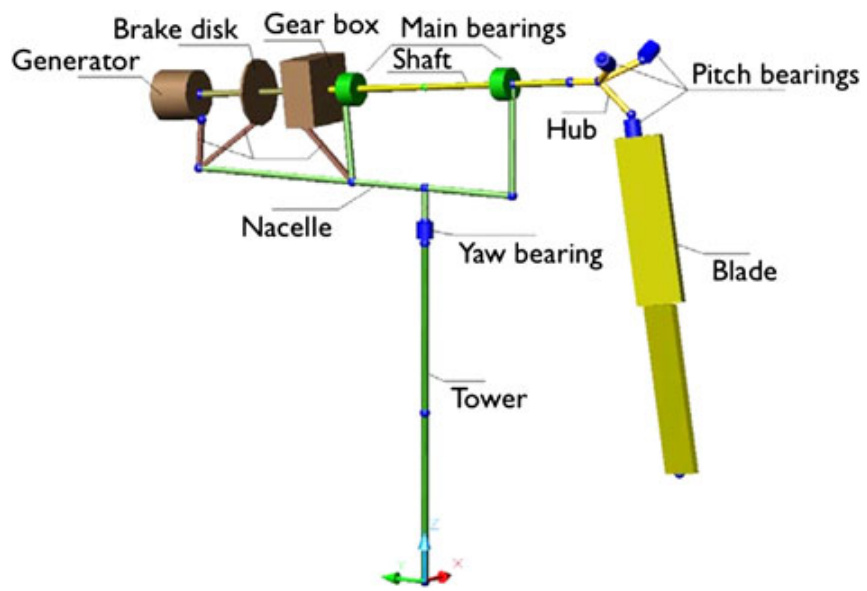
Figure 1. Sketch of the BHawC model substructures.
this equilibrium configuration, increments of the positions and the orientations $\delta\pmb{u}$ , the velocities $\delta\dot{\pmb{u}}$ and the accelerations $\delta\ddot{\pmb{u}}$ are obtained using Newton–Raphson iteration with the tangent relation obtained from the variation of Equation (1) as
这种平衡构型下,位置和姿态的增量 $\delta\pmb{u}$ 、速度 $\delta\dot{\pmb{u}}$ 和加速度 $\delta\ddot{\pmb{u}}$ 采用牛顿-拉夫逊迭代法获得,其切线关系式由方程 (1) 的变分推导得到,作为
$$
\mathbf{M}(q)\delta{\ddot{u}}+\mathbf{C}(q,{\dot{u}})\delta{\dot{u}}+\mathbf{K}(p,q,{\dot{u}},{\ddot{u}})\delta u=r
$$
where M, C and $\mathbf{K}$ are the tangent mass, damping/gyroscopic and stiffness matrices, respectively, and $r=f_{\mathrm{ext}}+f_{\mathrm{iner}}+$ $f_{\mathrm{damp}}\!-\!f_{\mathrm{int}}$ is the residual. The stiffness matrix is composed of constitutive, geometric and inertial stiffness. The orientation $\pmb q$ of the nodes is described by quaternions, also known as the Euler parameters,18 a general four-parameter representation equivalent to a triad, which for node number $i$ is updated as
其中 M、C 和 $\mathbf{K}$ 分别为切向质量、阻尼/陀螺和刚度矩阵,且 $r=f_{\mathrm{ext}}+f_{\mathrm{iner}}+$ $f_{\mathrm{damp}}\!-\!f_{\mathrm{int}}$ 为残余量。刚度矩阵由本构刚度、几何刚度和惯性刚度组成。节点方向 $\pmb q$,由四元数描述,也称为欧拉参数18,这是一种与三维坐标系等效的通用四参数表示,对于节点编号 $i$ 而言,其更新方式为:
$$
\pmb q_{i}:=q u a t(\delta\pmb u_{i,\mathrm{rot}})*\pmb q_{i}
$$
where $\delta\mathbf{\boldsymbol{u}}_{i,\mathrm{rot}}$ contains three rotations that are assumed infinitesimal and thus commute and where this rotation pseudovector is transformed by the function termed quat into a quaternion, which is used to update the nodal quaternion $\pmb q_{i}$ employing the special quaternion product denoted by $^*$ , which maintains the unity of the quaternion. The nodal positions $\pmb{p}$ , the nodal velocities $\dot{\pmb u}$ and the accelerations $\ddot{u}$ are updated by regular addition of the positional part of $\delta\pmb{u},\,\delta\dot{\pmb{u}}$ and $\delta\ddot{\pmb{u}}$ , respectively. All components in $\pmb{p}$ , $\pmb q$ and $\delta\pmb{u}$ are absolute and described in a global frame.
The present work considers small perturbations in position and orientation ${\bf\delta y}$ , velocity $\dot{\mathbf{y}}$ and acceleration $\ddot{\mathbf{y}}$ to a steady state with constant mean rotor speed $\varOmega$ defined by $(p_{\mathrm{ss}},q_{\mathrm{ss}},\dot{\pmb u}_{\mathrm{ss}},\ddot{\pmb u}_{\mathrm{ss}})$ , the steady state positions, orientations, velocities and accelerations, respectively, all periodic with the rotor period $T=2\pi/\varOmega$ . The linearized equations of motion are obtained from equation (2) at $r\approx\theta$ as
其中 $\delta\mathbf{\boldsymbol{u}}_{i,\mathrm{rot}}$ 包含三个假设为无穷小的旋转,因此可以交换,并且这个旋转伪矢量通过称为“quat”的函数转换成一个四元数,用于更新节点四元数 $\pmb q_{i}$,采用特殊的四元数乘积(用 $^*$ 表示),该乘积保持四元数的模为一。节点位置 $\pmb{p}$ 、节点速度 $\dot{\pmb u}$ 和加速度 $\ddot{u}$ 分别通过正规地加回 $\delta\pmb{u}$、$\delta\dot{\pmb{u}}$ 和 $\delta\ddot{\pmb{u}}$ 的位置部分来更新。$\pmb{p}$、$\pmb q$ 和 $\delta\pmb{u}$ 中的所有分量都是绝对的,并且描述在全局坐标系中。
本工作考虑了位置和姿态 ${\bf\delta y}$ 、速度 $\dot{\mathbf{y}}$ 和加速度 $\ddot{\mathbf{y}}$ 在稳态下发生的微小扰动,稳态具有恒定的平均风轮转速 $\varOmega$,由 $(p_{\mathrm{ss}},q_{\mathrm{ss}},\dot{\pmb u}_{\mathrm{ss}},\ddot{\pmb u}_{\mathrm{ss}})$ 定义,分别代表稳态位置、姿态、速度和加速度,它们都具有风轮周期 $T=2\pi/\varOmega$ 。运动方程的线性化是通过在 $r\approx\theta$ 时从方程 (2) 获得的。
$$
{\bf M}({q}_{\mathrm{ss}})\ddot{\boldsymbol{y}}+{\bf C}({q}_{\mathrm{ss}},\dot{\boldsymbol{u}}_{\mathrm{ss}})\dot{\boldsymbol{y}}+{\bf K}({p}_{\mathrm{ss}},{q}_{\mathrm{ss}},\dot{\boldsymbol{u}}_{\mathrm{ss}},\ddot{\boldsymbol{u}}_{\mathrm{ss}}){\boldsymbol{y}}=\boldsymbol{\theta}
$$
where the matrices $\mathbf{M}$ , $\mathbf{C}$ and $\mathbf{K}$ are the $T$ -periodic tangent system matrices that are employed in the modal analysis described in the next section.
其中,矩阵 $\mathbf{M}$ 、 $\mathbf{C}$ 和 $\mathbf{K}$ 是在下一节中描述的模态分析中使用的 $T$ 周期切线系统矩阵。
# 3. METHODS
In this section, the four methods for modal analysis of structures with rotors are presented.
在本节中,将介绍四种带有风轮结构的模态分析方法。
# 3.1. Coleman approach
The Coleman transformation requires identical degrees of freedom on each blade, and therefore, the equations of motion (equation (4)) in global coordinates were first transformed into substructure coordinates $y_{\mathrm{T}}$ . The transformation is
科尔曼变换要求每个叶片具有相同的自由度,因此,首先将全局坐标系下的运动方程(方程(4))转换到次结构坐标 $y_{\mathrm{T}}$ 。该变换是:
$$
\begin{array}{r l}&{\boldsymbol{y}=\mathrm{\mathbf{T}}\boldsymbol{y}_{\mathrm{T}}}\\ &{\mathbf{T}=\mathbf{diag}(\mathbf{I}_{N_{s}},\mathbf{T}_{\mathrm{r}},\mathbf{T}_{\mathrm{b1}},\mathbf{T}_{\mathrm{b2}},\mathbf{T}_{\mathrm{b3}})}\end{array}
$$
where $\mathbf{T}$ is a block diagonal time-variant matrix composed of the identity matrix $\mathbf{I}_{N_{\mathrm{s}}}$ sized by the number of degrees of freedom of the tower, the nacelle and the drivetrain, $\mathbf{T_{r}}$ transforms the degrees of freedom on the shaft and the hub into a hub centre frame and $\mathrm{T}_{\mathfrak{b}j}$ transforms the degrees of freedom on blade number $j=1,2,3$ into a local frame for blade $j$ . The triads were obtained in the periodic steady state, and thus, $\mathbf{T}$ is $T$ -periodic.
The time-variant transformation into inertial frame coordinates $z$ is
其中,$\mathbf{T}$ 是一个块对角时间变动矩阵,由塔、机舱和传动系统自由度数量定义的单位矩阵 $\mathbf{I}_{N_{\mathrm{s}}}$ 组成,$\mathbf{T_{r}}$ 将主轴和轮毂的自由度变换到轮毂中心系,$\mathrm{T}_{\mathfrak{b}j}$ 将叶片编号 $j=1,2,3$ 的自由度变换到叶片 $j$ 的局部系。这些坐标系是在周期稳态下获得的,因此,$\mathbf{T}$ 是 $T$ 周期性的。
时间变动变换到惯性系坐标 $z$ 是
$$
\begin{array}{r l}&{{\mathbf y}_{\mathrm{T}}={\mathbf B}\,z}\\ &{{\mathbf B}={\textbf d i a g}({\mathbf I}_{N_{\mathrm{s}}},{\mathbf B}_{\mathrm{r}},{\mathbf B}_{\mathrm{b}})}\end{array}
$$
where $\mathbf{B}_{\mathrm{r}}$ is a simple rotational transformation of the shaft and the hub and $\mathbf{B}_{\mathrm{b}}$ is the Coleman transformation introducing multiblade coordinates for a three-bladed rotor11,19 as
其中 $\mathbf{B}_{\mathrm{r}}$ 是主轴和轮毂的一个简单旋转变换,而 $\mathbf{B}_{\mathrm{b}}$ 是科尔曼变换,它引入了三叶片风轮的多叶片坐标系11,19,如下所示:
$$
\mathbf{B}_{\mathrm{b}}=\left[\begin{array}{l l l}{\mathbf{I}_{N_{\mathrm{b}}}}&{\mathbf{I}_{N_{\mathrm{b}}}\cos\psi_{1}}&{\mathbf{I}_{N_{\mathrm{b}}}\sin\psi_{1}}\\ {\mathbf{I}_{N_{\mathrm{b}}}}&{\mathbf{I}_{N_{\mathrm{b}}}\cos\psi_{2}}&{\mathbf{I}_{N_{\mathrm{b}}}\sin\psi_{2}}\\ {\mathbf{I}_{N_{\mathrm{b}}}}&{\mathbf{I}_{N_{\mathrm{b}}}\cos\psi_{3}}&{\mathbf{I}_{N_{\mathrm{b}}}\sin\psi_{3}}\end{array}\right]
$$
where $\psi_{j}=\varOmega t+2\pi(j-1)/3$ is the mean azimuth angle to blade number $j$ and $N_{\mathrm{b}}$ is the number of degrees of freedom on each blade. The inertial frame coordinate vector
其中 $\psi_{j}=\varOmega t+2\pi(j-1)/3$ 是叶片序号 $j$ 的平均方位角,$N_{\mathrm{b}}$ 是每个叶片上的自由度数量。惯性坐标系向量
$$
\boldsymbol{z}=\{y_{\mathrm{s}}^{\mathrm{T}}\,z_{\mathrm{r}}^{\mathrm{T}}\,a_{0}^{\mathrm{T}}\,a_{1}^{\mathrm{T}}\,b_{1}^{\mathrm{T}}\}^{\mathrm{T}}
$$
contains the untransformed coordinates for tower, nacelle and drivetrain ${\mathfrak{y}}_{\mathrm{s}}$ , the coordinates for shaft and hub $z_{\mathrm{r}}$ measured in a non-rotating frame aligned with the hub and the multiblade symmetric coordinates $\pmb{a}_{0}$ , cosine coordinates $\pmb{a}_{1}$ and sine coordinates $\pmb{b}_{1}$ . The details on how multiblade coordinates describe the motion of a wind turbine rotor in the inertial frame are discussed by Hansen.20,21
The Coleman transformed equations were obtained by first inserting equation (5) into equation (4), then converting it to first order form and lastly introducing the inertial frame transformation in equation (6) as ${\displaystyle y_{\mathrm{T}2}=\mathrm{diag}({\bf B},{\bf B})z_{2}}$ where ${y}_{\mathrm{T}2}=\{{y}^{\mathrm{T}}\,{\dot{{y}}}^{\mathrm{T}}\}^{\mathrm{T}}$ and $z_{2}=\dot{\{z^{\mathrm{T}}\,\tilde{z}^{\mathrm{T}}\}}^{\mathrm{T}}$ are the state v ectors in substructure and ine rtial frames, respectively, with $\tilde{z}=\dot{z}+\bar{\omega}z$ and the constant matrix $\bar{\boldsymbol{\omega}}=\mathbf{B}^{-1}\mathbf{B}$ . The result is
包含塔架、机舱和传动系统 ${\mathfrak{y}}_{\mathrm{s}}$ 的未转换坐标,主轴和轮毂 $z_{\mathrm{r}}$ 在与轮毂对齐的非旋转参考系中测量,以及多叶对称坐标 $\pmb{a}_{0}$,余弦坐标 $\pmb{a}_{1}$ 和正弦坐标 $\pmb{b}_{1}$。Hansen.20,21 讨论了多叶坐标如何描述风轮叶片在惯性参考系中的运动。
通过首先将方程(5)代入方程(4),然后将其转换为一阶形式,最后引入方程(6)中的惯性参考系变换,获得了 Coleman 变换后的方程,形式为 ${\displaystyle y_{\mathrm{T}2}=\mathrm{diag}({\bf B},{\bf B})z_{2}}$,其中 ${y}_{\mathrm{T}2}=\{{y}^{\mathrm{T}}\,{\dot{{y}}}^{\mathrm{T}}\}^{\mathrm{T}}$ 和 $z_{2}=\dot{\{z^{\mathrm{T}}\,\tilde{z}^{\mathrm{T}}\}}^{\mathrm{T}}$ 分别是子结构和惯性参考系中的状态向量,且 $\tilde{z}=\dot{z}+\bar{\omega}z$,$\bar{\boldsymbol{\omega}}=\mathbf{B}^{-1}\mathbf{B}$ 为常数矩阵。结果为:
$$
\begin{array}{r l}&{\dot{z}_{2}=\mathbf{A}_{\mathrm{B}}z_{2}}\\ &{\mathbf{A}_{\mathrm{B}}=\left[\mathbf{-}\mathbf{\bar{\omega}}-\mathbf{\bar{\omega}}\mathbf{\bar{\omega}}_{\mathrm{KB}}\quad\mathbf{-M}_{\mathrm{B}}^{-1}\mathbf{C}_{\mathrm{B}}-\mathbf{\bar{\omega}}\right]}\end{array}
$$
where $\mathbf{A}_{\mathrm{B}}$ is the Coleman transformed system matrix and
其中 $\mathbf{A}_{\mathrm{B}}$ 是科尔曼变换后的系统矩阵,并且
$$
\begin{array}{r l}&{\mathbf{M}_{\mathrm{B}}=\mathbf{B}^{-1}\mathbf{T}^{\mathrm{T}}\mathbf{M}\mathbf{T}\,\mathbf{B}}\\ &{\mathbf{C}_{\mathrm{B}}=\mathbf{B}^{-1}\mathbf{T}^{\mathrm{T}}(\mathbf{C}\,\mathbf{T}+2\,\mathbf{M}\,\dot{\mathbf{T}})\mathbf{B}}\\ &{\mathbf{K}_{\mathrm{B}}=\mathbf{B}^{-1}\mathbf{T}^{\mathrm{T}}(\mathbf{K}\,\mathbf{T}+\mathbf{C}\,\dot{\mathbf{T}}+\mathbf{M}\,\ddot{\mathbf{T}})\mathbf{B}}\end{array}
$$
are the Coleman transformed mass, damping/gyroscopic and stiffness matrices, respectively. If the system is isotropic, then $\mathbf{A}_{\mathrm{B}}$ is time-invariant, and a transient solution of equation (9) is
分别是柯尔曼变换的质量、阻尼/陀螺和刚度矩阵。如果系统是各向同性,则 $\mathbf{A}_{\mathrm{B}}$ 是时不变的,方程 (9) 的瞬态解是
$$
z_{2}=\mathrm{e}^{\mathbf{A}_{\mathrm{B}}t}z_{2}(0)=\mathbf{V}\mathrm{e}^{\Lambda t}q(0)
$$
where $\Lambda$ is a diagonal matrix containing the eigenvalues of $\mathbf{A}_{\mathrm{B}}$ , $\mathbf{V}$ contains the corresponding eigenvectors as columns and $\pmb q(0)=\mathbf V^{-1}z_{2}(0)$ are the initial conditions in modal coordinates. It is assumed that all eigenvectors are linearly independent .
The blade motion given in the inertial frame in equation (11) can be transformed back into the rotating frame using equation (6) as $^{21}$
其中 $\mathbf{A}$ 是包含 $\mathbf{A}_{\mathrm{B}}$ 特征值的对角矩阵,$\mathbf{V}$ 包含相应的特征向量作为列,且 $\pmb q(0)=\mathbf V^{-1}z_{2}(0)$ 是模态坐标下的初始条件。假设所有特征向量线性无关。
惯性坐标系中的叶片运动(见公式(11))可以使用公式(6)转换回旋转坐标系,表示为 $^{21}$
$$
y_T,i k=\mathrm{e}^{\sigma_{k}t}\left(A_{0,i k}\cos(\omega_{k}t+\varphi_{0,i k})+A_{\mathrm{BW},i k}\cos\left((\omega_{k}+\Omega)t+\varphi_{j}+\varphi_{\mathrm{BW},i k}\right)+A_{\mathrm{FW},i k}\cos\left((\omega_{k}-\Omega)t-\varphi_{j}+\varphi_{\mathrm{GW},i k}\right)\right),
$$
where $\varphi_{j}=2\pi(j-1)/3$ and $\sigma_{k}$ and $\omega_{k}$ pare the modal damping and frequency of mode number $k$ , respectively, given by the eigenvalue $\lambda_{k}=\sigma_{k}+\mathrm{i}\omega_{k}$ with $\mathrm{i}=\sqrt{-1}$ . The amplitudes for degree of freedom number $i$ were determined from the components of the eigenvector $\nu_{k}$ gi ven in multiblade coordinates of equation (8) as $A_{0,i k}=|a_{0,i k}|$ and
其中 $\varphi_{j}=2\pi(j-1)/3$ ,$\sigma_{k}$ 和 $\omega_{k}$ 分别为模态阻尼和第 $k$ 个模态的频率,由特征值 $\lambda_{k}=\sigma_{k}+\mathrm{i}\omega_{k}$ 给出,其中 $\mathrm{i}=\sqrt{-1}$ 。自由度编号 $i$ 的振幅由方程 (8) 中多叶片坐标的特征向量 $\nu_{k}$ 的分量确定,为 $A_{0,i k}=|a_{0,i k}|$ 并且
$$
\begin{array}{r l}&{A_{\mathrm{BW},i k}=\frac{1}{2}\big((\mathrm{Re}\,(a_{1,i k})+\mathrm{Im}\,(b_{1,i k}))^{2}+(\mathrm{Re}\,(b_{1,i k})-\mathrm{Im}\,(a_{1,i k}))^{2}\big)^{1/2}}\\ &{A_{\mathrm{FW},i k}=\frac{1}{2}\big((\mathrm{Re}\,(a_{1,i k})-\mathrm{Im}\,(b_{1,i k}))^{2}+(\mathrm{Re}\,(b_{1,i k})+\mathrm{Im}\,(a_{1,i k}))^{2}\big)^{1/2}}\end{array}
$$
where the subscripts 0, BW and FW denote symmetric, backward whirling and forward whirling motion, respectively.
其中,下标 0、BW 和 FW 分别表示对称、后旋和前旋运动。
# 3.2. Classical Floquet analysis
Floquet analysis enables the solution of the periodic equations of motion directly without an explicit transformation. Equation (4) is written in first order form
Floquet 分析能够直接求解周期运动方程,无需显式变换。方程 (4) 以一阶形式写出。
$$
\begin{array}{r l}&{\dot{\boldsymbol{y}}_{2}=\mathbf{A}\boldsymbol{y}_{2}}\\ &{\mathbf{A}=\left[\mathbf{-M}^{-1}\mathbf{K}\quad\mathbf{-M}^{-1}\mathbf{C}\right]}\end{array}
$$
where ${\mathbf y}_{2}=\{{\mathbf y}^{{\mathrm T}}\,\dot{{\mathbf y}}^{{\mathrm T}}\}^{{\mathrm T}}$ is the state vector and $\mathbf{A}$ is the $T$ -periodic system matrix.
Floquet theory$^{22}$ states that the solution to equation (15) is of the form
其中 ${\mathbf y}_{2}=\{{\mathbf y}^{{\mathrm T}}\,\dot{{\mathbf y}}^{{\mathrm T}}\}^{{\mathrm T}}$ 是状态向量,$\mathbf{A}$ 是 $T$ -周期系统矩阵。
Floquet理论$^{22}$ 指出,方程 (15) 的解具有如下形式:
$$
\mathbf{\boldsymbol{y}}_{2}=\mathbf{\boldsymbol{U}}\mathbf{\boldsymbol{e}}^{\mathbf{\boldsymbol{\Lambda}}t}\mathbf{\boldsymbol{U}}^{-1}(0)\mathbf{\boldsymbol{y}}_{2}(0)
$$
where $\mathbf{U}$ is a $T$ -periodic matrix and $\mathbf{A}$ is a diagonal matrix. One way to construct this solution is to form a fundamental solution to equation (15) as
其中 $\mathbf{U}$ 是一个 $T$ 周期矩阵,而 $\mathbf{A}$ 是一个对角矩阵。一种构造该解的方法是构造方程 (15) 的基本解,如下所示:
$$
\displaystyle\varphi=\bigl[\varphi_{1}\quad\varphi_{2}\quad.\ .\quad\varphi_{N}\bigr]
$$
over one period, $t\ \in\ [0;T]$ , where $N$ is the number of state variables, such that $\dot{\varphi}\;=\;{\bf A}\varphi$ . The monodromy matrix defined as
在周期内,$t\ \in\ [0;T]$ ,其中 $N$ 为状态变量的数量,且 $\dot{\varphi}\;=\;{\bf A}\varphi$ 。单值性矩阵定义为:
$$
\mathbf{C}=\boldsymbol{\varphi}^{-1}(0)\boldsymbol{\varphi}(T)
$$
contains all modal properties, which can be extracted from the eigenvalue decomposition
包含所有模态特性,可通过特征值分解提取。
$$
\mathbf{C}=\mathbf{V}\mathbf{J}\mathbf{V}^{-1}
$$
where $\mathbf{V}$ contains the column eigenvectors $\nu_{k}$ of $\mathbf{C}$ , which are all assumed to be linearly independent and $\mathbf{J}$ is a diagonal matrix containing the eigenvalues $\rho_{k}$ of $\mathbf{C}$ , called the characteristic multipliers. The characteristic exponents $\lambda_{k}=\sigma_{k}+\mathrm{i}\omega_{k}$ contain the frequency $\omega_{k}$ and damping $\sigma_{k}$ and are related to the characteristic multipliers as $\rho_{k}=\exp(\lambda_{k}T)$ . Because the complex logarithm is not unique, the frequency is not determined uniquely, and the principal frequency $\omega_{\mathrm{p},k}$ and the damping $\sigma_{k}$ are defined from the characteristic multipliers as
其中 $\mathbf{V}$ 包含矩阵 $\mathbf{C}$ 的列特征向量 $\nu_{k}$,假设它们线性无关,而 $\mathbf{J}$ 是一个对角矩阵,包含矩阵 $\mathbf{C}$ 的特征值 $\rho_{k}$,称为特征乘数。特征指数 $\lambda_{k}=\sigma_{k}+\mathrm{i}\omega_{k}$ 包含频率 $\omega_{k}$ 和阻尼 $\sigma_{k}$,并且与特征乘数相关,关系为 $\rho_{k}=\exp(\lambda_{k}T)$。由于复数对数不唯一,频率不能唯一确定,因此从特征乘数定义了主频率 $\omega_{\mathrm{p},k}$ 和阻尼 $\sigma_{k}$。
$$
\begin{array}{c}{\displaystyle\sigma_{k}=\frac{1}{T}\ln(\vert\rho_{k}\vert)}\\ {\displaystyle\omega_{\mathrm{p},k}=\frac{1}{T}\arg(\rho_{k})}\end{array}
$$
where $\arg(\rho_{k})\in\big[-\pi;\pi]$ is implied, resulting in $\omega_{\mathrm{p},k}\in\big[-\Omega/2;\Omega/2\big]$ . Any integer multiple of the rotor speed can be added to the principal frequency to obtain a more physically meaningful frequency23,24
其中隐含条件为 $\arg(\rho_{k})\in\big[-\pi;\pi]$,由此得出 $\omega_{\mathrm{p},k}\in\big[-\Omega/2;\Omega/2\big]$。 可以将风轮转速的任意整数倍加到主频上,以获得更具物理意义的频率²³,²⁴
$$
\omega_{k}=\omega_{\mathrm{p},k}+j_{k}\Omega
$$
a choice that also affects the periodic modal matrix $\mathbf{U}$ in equation (16). This matrix $\mathbf{U}$ contains the periodic mode shapes uk and is given as24
一个也会影响方程(16)中的周期模态矩阵 $\mathbf{U}$ 的选择。该矩阵 $\mathbf{U}$ 包含周期模态形状 uk,其表达式为24。
$$
\pmb{u}_{k}=\varphi\nu_{k}\mathrm{e}^{-\lambda_{k}t}
$$
where the real part of $\lambda_{k}$ is given by equation (20) and the imaginary part of $\lambda_{k}$ is defined by equation (21) by selecting $j_{k}$ such that $\pmb{u}_{k}$ is as constant as possible for degrees of freedXom measured in the inertial frame.
Introducing the Fourier transform of the periodic mode shape
其中,$\lambda_{k}$ 的实部由公式(20)给出,虚部由公式(21)定义,通过选择 $j_{k}$ 使得在惯性坐标系测量的自由度方向上,$\pmb{u}_{k}$ 尽可能恒定。
引入周期模态的傅里叶变换
$$
{\pmb u}_{k}=\sum_{j=-\infty}^{\infty}u_{j k}\mathrm{e}^{\mathrm{i}j\Omega t}
$$
the transient solution in equation (16) can be written as a sum of harmonic components
方程 (16) 中的瞬态解可以写成谐波分量的和。
$$
y_{2}=\sum_{k=1}^{N}\sum_{j=-\infty}^{\infty}\mathcal{U}_{j k}\mathrm{e}^{(\sigma_{k}+\mathrm{i}(\omega_{k}+j\Omega))t}q_{k}(0)
$$
where $\begin{array}{r}{\pmb q(0)=\mathbf{U}^{-1}(0)\mathbf{y}_{2}(0).}\end{array}$ . Note that equation (12) is a special case of this expression for $j=-1,0,1$
其中 $\begin{array}{r}{\pmb q(0)=\mathbf{U}^{-1}(0)\mathbf{y}_{2}(0).}\end{array}$ 。 注意,当 $j=-1,0,1$ 时,方程 (12) 是此表达式的一个特例。
# 3.3. Implicit Floquet analysis
The implicit Floquet method is here described based on the detailed description in Bauchau and Nikishkov,12 which focuses on computation of the characteristic multipliers from the state transition matrix $\Phi(T,0)$ . It can be defined in classical Floquet theory as
基于Bauchau和Nikishkov的详细描述,本文介绍隐式Floquet方法,重点在于从状态转移矩阵$\Phi(T,0)$计算特征乘数。它可在经典Floquet理论中定义为:
$$
\boldsymbol{\varphi}(T)=\boldsymbol{\Phi}(T,0)\,\boldsymbol{\varphi}(0)
$$
Using equation (18), the relationship between the state transition and monodromy matrices is derived as
使用公式(18),推导了状态转移矩阵与单值性矩阵之间的关系。
$$
\Phi(T,0)=\varphi(0){\bf C}\,\varphi^{-1}(0)
$$
showing that $\Phi(T,0)$ and C have identical eigenvalues (characteristic multipliers), and their eigenvectors are related as $\pmb{\nu}_{k}=\pmb{\varphi}^{-1}(0)\pmb{w}_{k}$ , where $w_{k}$ represents the eigenvectors of $\Phi(T,0)$ .
表明 $\Phi(T,0)$ 和 C 具有相同的特征值(特征乘数),且它们的特征向量之间存在如下关系:$\pmb{\nu}_{k}=\pmb{\varphi}^{-1}(0)\pmb{w}_{k}$ ,其中 $\pmb{w}_{k}$ 代表 $\Phi(T,0)$ 的特征向量。
The key feature of the state transition matrix is that it defines the solution $y_{2}(T)=\Phi(T,0)y_{2}(0)$ for a time integration of the system equations (equation (15)) over one period $T$ with initial conditions ${\mathfrak{y}}_{2}(0)$ . Hence, without knowing the state transition matrix, it is possible to obtain the product of it with an arbitrary vector (the initial state vector) by integration of
关键在于状态转移矩阵定义了系统方程(式(15))在周期 $T$ 内的时间积分解 $y_{2}(T)=\Phi(T,0)y_{2}(0)$,初始条件为 ${\mathfrak{y}}_{2}(0)$。因此,在不知道状态转移矩阵的情况下,可以通过积分来获得它与任意向量(初始状态向量)的乘积。
equation (15) over one period. The Arnoldi algorithm25 is a method to approximate the eigenvalues and the eigenvectors of a matrix, say $\Phi(T,0)$ , using only the matrix multiplication with $\Phi(T,0)$ to construct an $m$ -sized subspace
方程 (15) 描述了一个周期内的状态。Arnoldi算法²⁵是一种近似矩阵(例如 $\Phi(T,0)$ )的特征值和特征向量的方法,仅通过与 $\Phi(T,0)$ 的矩阵乘法构建一个 $m$ 维子空间。
$$
\mathbf{P}=\left[p_{1}\quad p_{2}\quad\ldots\quad p_{m}\right]
$$
that satisfies the orthonormality condition
$$
\mathbf{P}^{\mathrm{T}}\mathbf{P}=\mathbf{I}
$$
and where the eigenvalues $\tilde{\rho}_{k}$ of the subspace projected state transition matrix
$$
\mathbf{H}=\mathbf{P}^{\mathrm{T}}\Phi(T,0)\mathbf{P}
$$
converge towards the eigenvalues $\rho_{k}$ of $\Phi(T,0)$ with the largest modulus as the size $m$ of the subspace increases. The subspace eigenvectors $\tilde{w}_{k}$ of $\mathbf{H}$ projected back to the full state space converge towards the eigenvectors $w_{k}$ of $\Phi(T,0)$ , i.e. $w_{k}\approx\mathbf{P}\tilde{w}_{k}$ . The Arnoldi algorithm proceeds as follows:
随着子空间维数 $m$ 的增大,子空间特征向量 $\tilde{w}_{k}$ 投影回完整状态空间,会收敛于 $\Phi(T,0)$ 的特征向量 $w_{k}$,即 $w_{k}\approx\mathbf{P}\tilde{w}_{k}$。阿诺尔迪算法的步骤如下:
Choose an arbitrary vector $\pmb{p}_{1}$ with $|p_{1}|=1$ for $n=1,2,\ldots,m$
$\pmb{a}:=\Phi(T,0)p_{n}$ (integration of equation (15) over $t\in[0;T])$
$\begin{array}{l}{b:=a}\\ {\mathrm{for~}j=1,2,\dotsc,n}\\ {\quad h_{j,n}:=p_{j}^{\operatorname{T}}a}\\ {\quad b:=b-h_{j,n}p_{j}}\end{array}$
end
if $n